

实测第一!卧安机器人发布自研世界动作模型 OneModel 1.7 FrontoStria-RL





2026 年 5 月,卧安机器人(OneRobotics)正式发布自研世界动作模型 OneModel 1.7 FrontoStria-RL。在具身智能标准评测基准 LIBERO 上,OneModel 1.7 平均成功率达到 99%,领先于 π0.5、GR00T-N1.5、OpenVLA-OFT 等主流公开模型;真机部署中,日常操作任务成功率 99%,高精度任务成功率 97%。
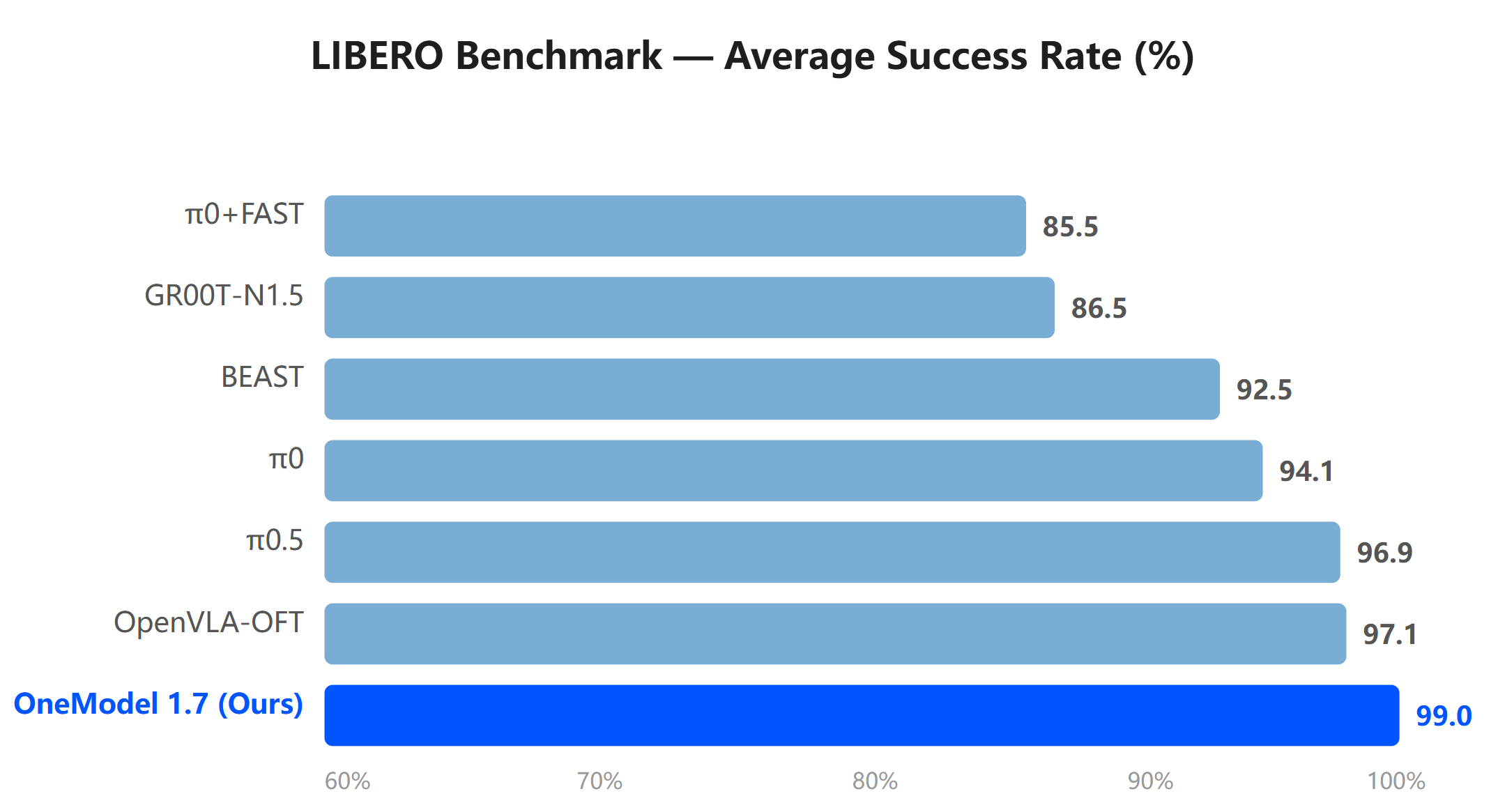
图1:标准 LIBERO 平均成功率对比
这一成绩来自卧安自主设计的 RL-Latent World Action Model 架构(RL-LWAM)。该架构由三大模块构成:World Model 负责跨场景泛化,Understand Expert 负责任务理解与 Skill 调度,Action Expert 负责精准执行——三者通过 Predictive Policy Latent 隐式连通,而非依赖显式的中间图像或坐标传递。在此之上,强化学习闭环与成功记忆机制将真实部署反馈持续回流至模型,能力随部署规模不断增强。
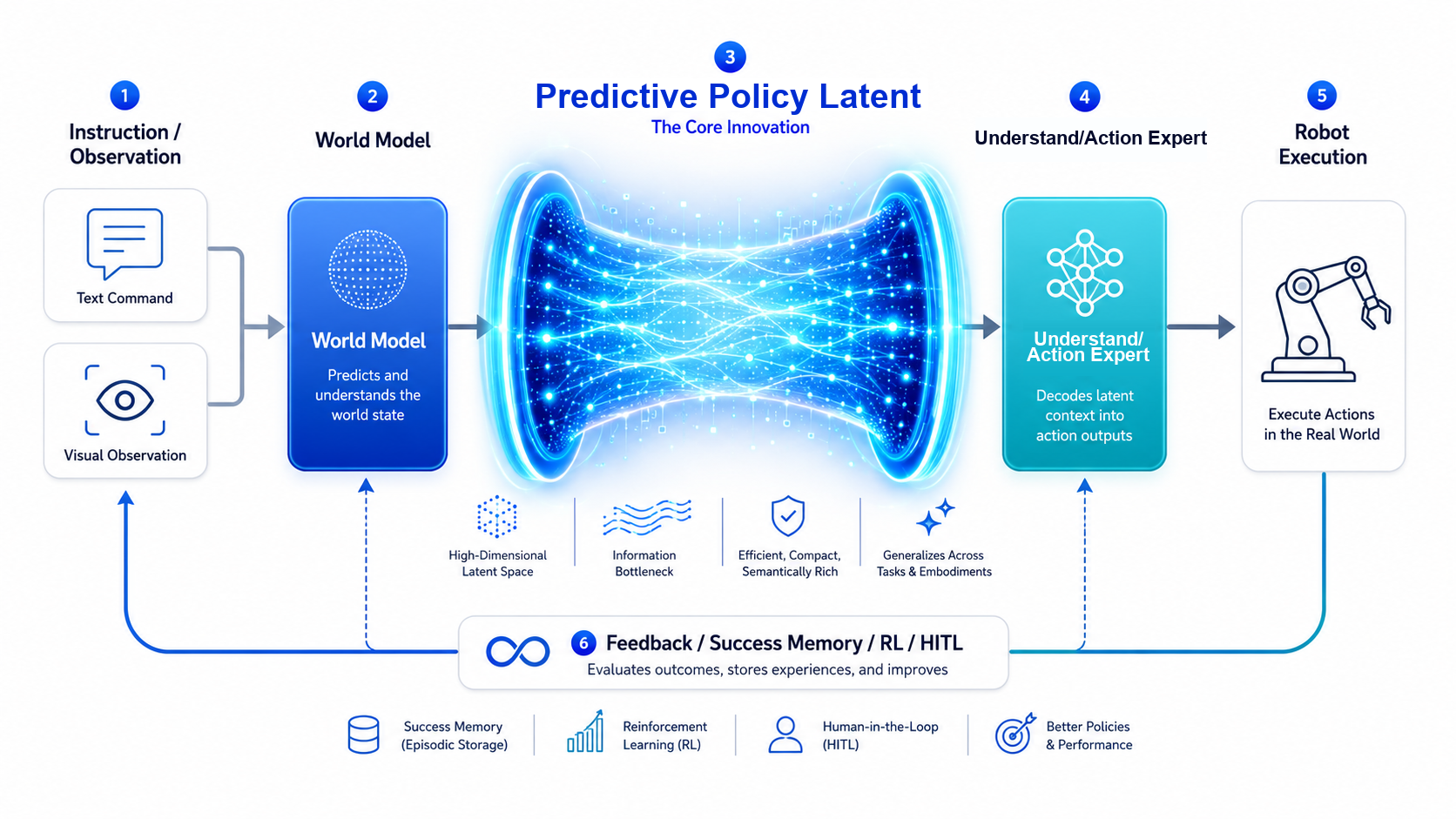
图2:OneModel 1.7 FrontoStria-RL 完整架构;Predictive Policy Latent 作为核心传导机制,连接 World Model、Understand Expert 与 Action Expert
为什么家庭机器人需要“世界动作模型”?
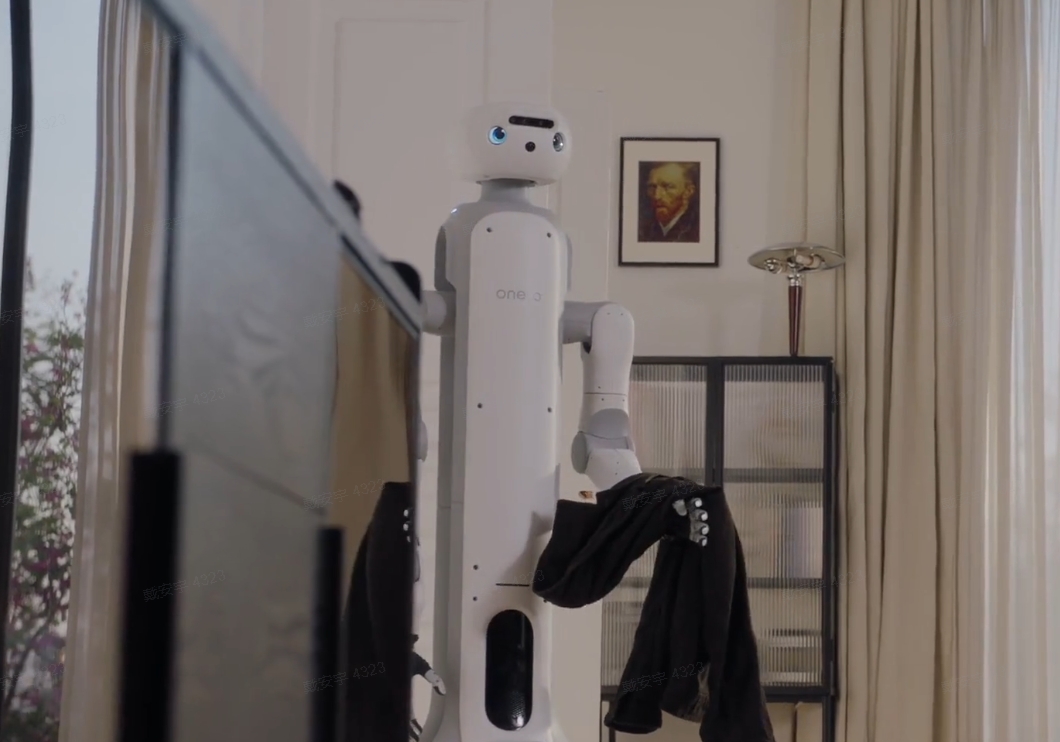
家庭环境是机器人走向大规模应用的核心入口,但也是对智能要求最高的场景。与工厂流水线或仓储拣选不同,家庭场景中没有两间完全相同的厨房,没有两个摆放一致的桌面,每天的任务组合也在不断变化。机器人不仅需要精确完成开门、叠衣、端碗、收纳等具体动作,还需要面对陌生物品、变化光照、不同户型时仍然能够理解任务并做出合理行动。
近两年,VLA 模型成为动作生成的重要范式,优势在于端到端地将视觉观测和语言指令直接映射为机器人动作,在训练数据覆盖充分、任务边界清晰的场景中表现高效。但单纯依赖端到端动作映射也会带来挑战:当物体摆放、相机视角、光照条件或机器人初始位姿发生变化时,动作策略容易受到影响;面对多阶段、多约束的复杂任务,也更容易丢失全局目标。
World Model 则试图建立对环境状态和任务演化的预测能力,包括物体关系、空间结构和动作后果,具备更强的泛化潜力。但它的难点在于落地执行:如果依赖显式未来图像或中间坐标来连接动作模块,容易引入生成误差、信息冗余和推理延迟;如果缺少与下游策略的有效耦合,“理解世界”并不会自然转化为“动得准”。
OneModel 1.7 的路径,不是简单叠加 VLA 与 World Model,而是通过 Predictive Policy Latent 在高层世界理解和底层动作策略之间建立隐式通道,让世界理解真正作用于任务规划和动作执行。
OneModel 1.7 FrontoStria-RL 的四大核心技术创新点
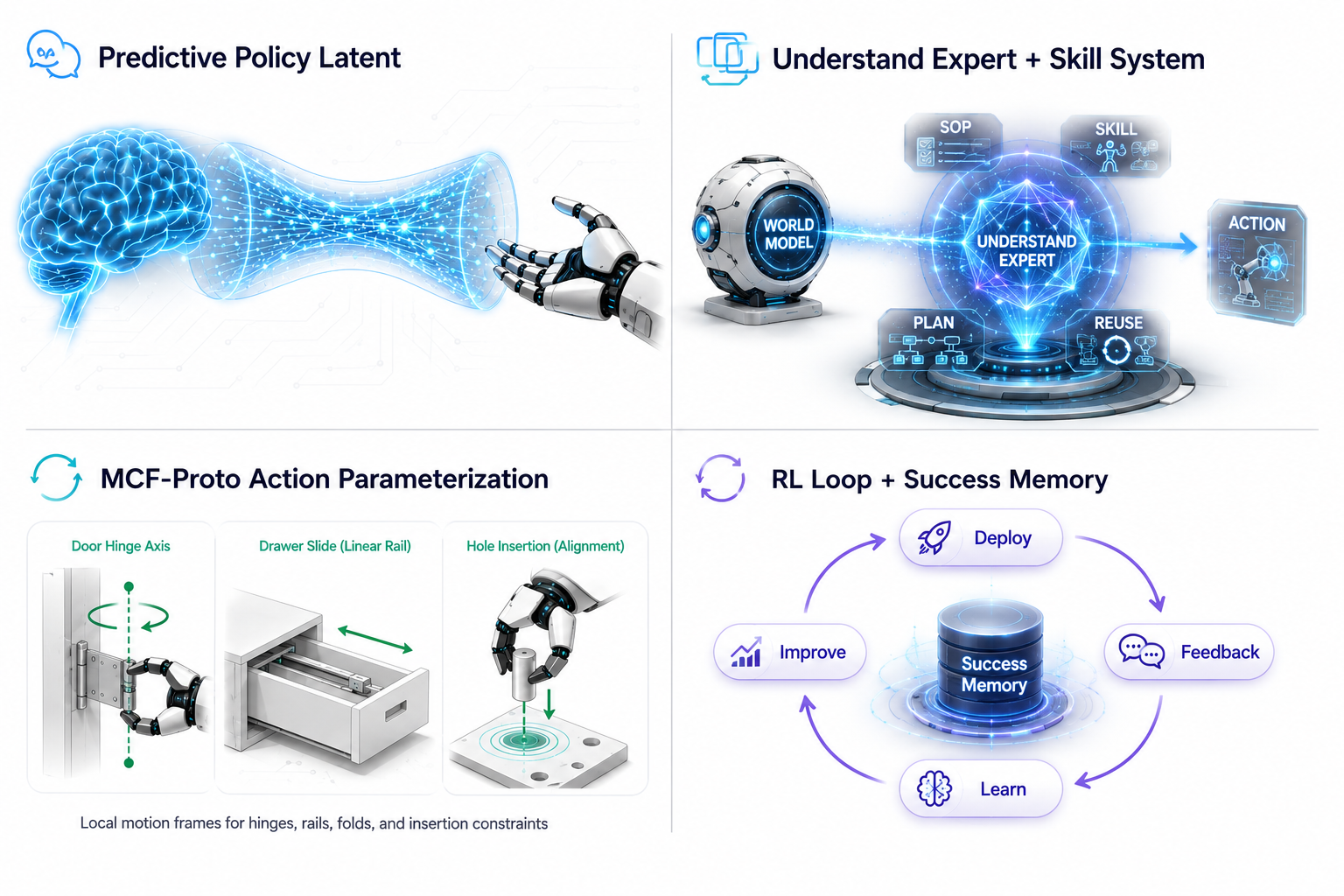
图3:OneModel 1.7 FrontoStria-RL 四大核心技术创新点
OneModel 1.7 的高成功率源于四项关键技术突破:
Predictive Policy Latent:以面向动作策略的隐式表征传递 World Model 的高层理解,取代传统方案对显式未来图像或目标点的依赖,消除信息冗余、生成误差和执行割裂。
Understand Expert + Skill:将复杂任务拆解为可执行步骤并调度可复用 Skill,使长流程任务具备清晰的阶段规划,避免局部动作正确但全局目标丢失。
MCF-Proto:围绕门轴、滑轨、孔位、折叠线等局部运动结构组织动作表示,使策略对视角变化、初始位姿偏差和场景扰动保持鲁棒。
RL 闭环 + Success Memory:将强化学习与成功经验复用接入真实部署反馈,突破离线训练模型“训完即用”的局限,持续适应长尾场景。
真机实测结果
在真实场景任务中,OneModel 1.7 覆盖了日常操作、高精度操作和高动态交互三类典型任务。其中,洗衣服、叠衣服、洗碗机操作、传送带拿取物品等日常操作任务平均成功率达到 99%;拔插试管、叠纸杯、倒咖啡豆等高精度任务平均成功率达到 97%。这表明模型不仅能在标准 benchmark 中取得领先表现,也能在包含柔性物体、多阶段流程、精细对准和真实接触反馈的任务中保持稳定。
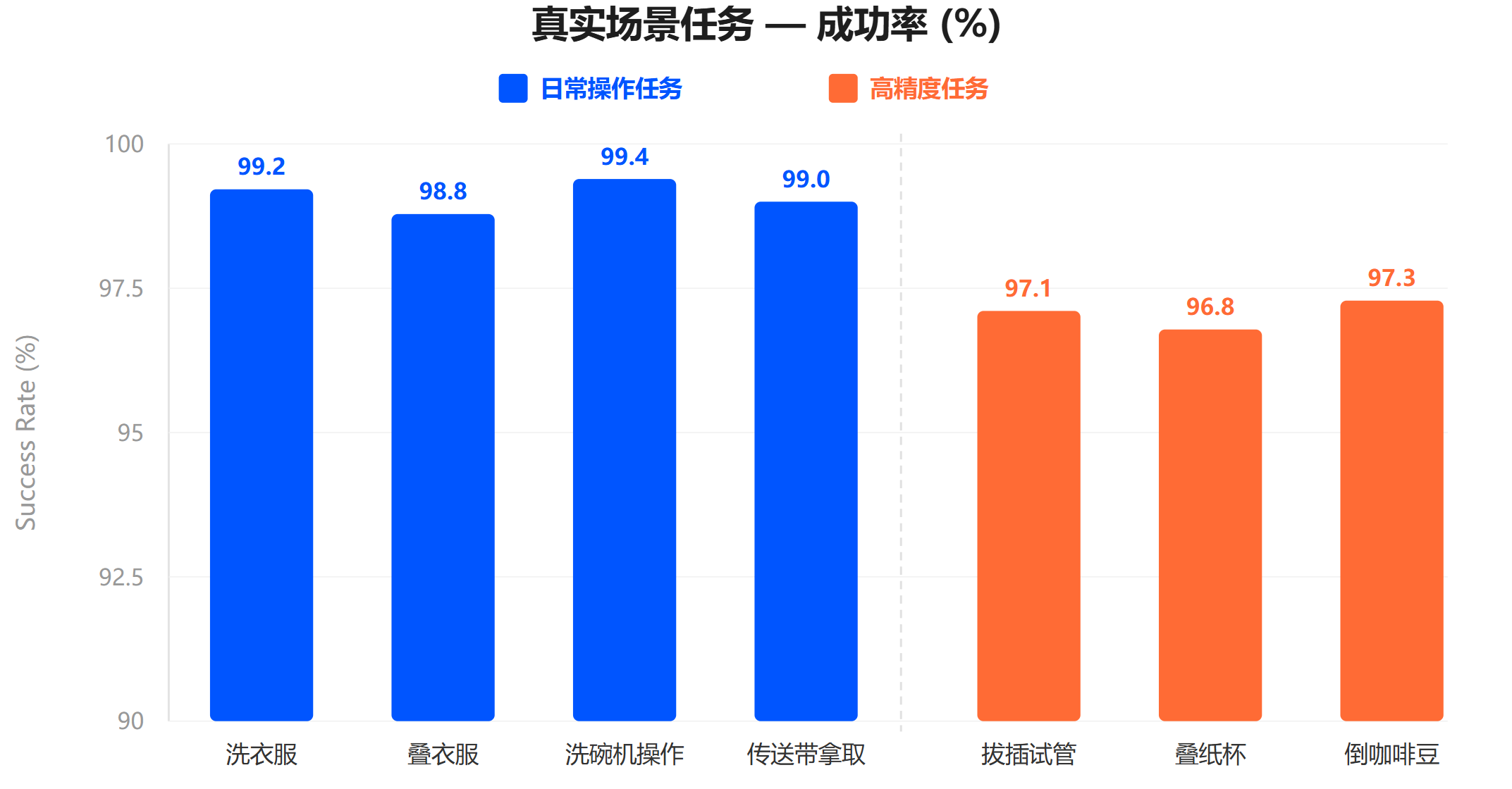
图4:日常操作与高精度任务真机验证
除了以接触操作为主的任务,OneModel 1.7 还在真人对打乒乓球场景中进行了验证。乒乓球任务对实时感知、轨迹预测和快速动作生成要求极高,能够体现模型在高动态交互场景下的响应能力。
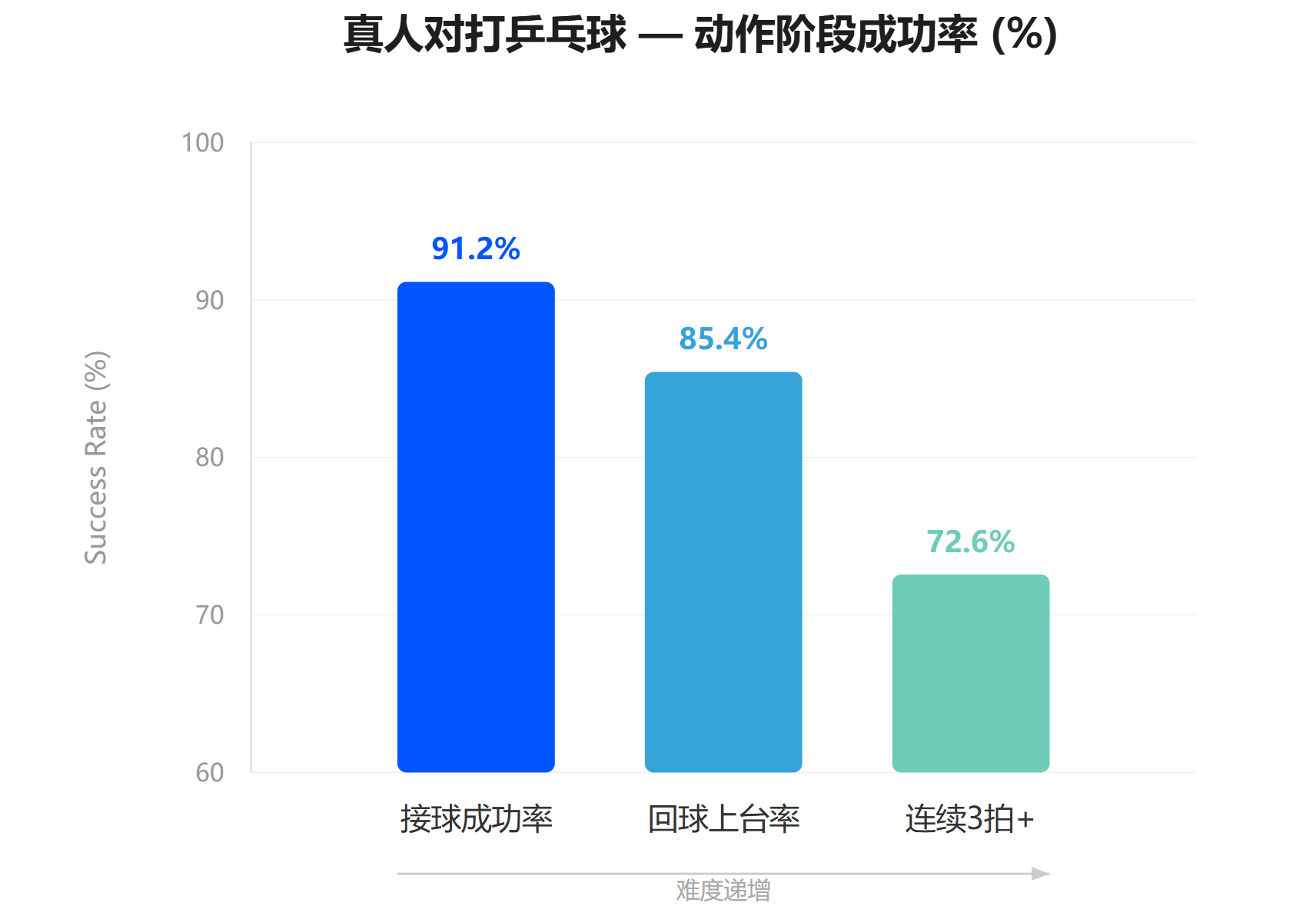
图5:真人对打乒乓球动态场景验证
迈向家庭机器人的下一站
具身智能走向真实世界,不能只依赖更大的模型参数,也不能只依赖更炫目的单次演示。真正能推动家庭机器人规模化落地的,是一套同时具备泛化理解、精准执行和持续进化能力的模型系统。
OneModel 1.7 FrontoStria-RL 正是沿着这一路径迈出的关键一步。
未来,卧安机器人将继续围绕真实家庭与服务场景推进模型迭代,让机器人从“能看懂、能行动”,进一步走向“能适应、能进化、能持久可靠”。
