



No.1 in Real-Robot Benchmarks: OneRobotics Launches Its Proprietary World Action Model, OneModel 1.7 FrontoStria-RL





In May 2026, OneRobotics officially launched its proprietary World Action Model, OneModel 1.7 FrontoStria-RL. On LIBERO, a standard benchmark for embodied AI, OneModel 1.7 achieved an average success rate of 99%, outperforming leading open models including π0.5, GR00T-N1.5, and OpenVLA-OFT. In real-robot deployment, it reached a 99% success rate on daily manipulation tasks and a 97% success rate on high-precision tasks.
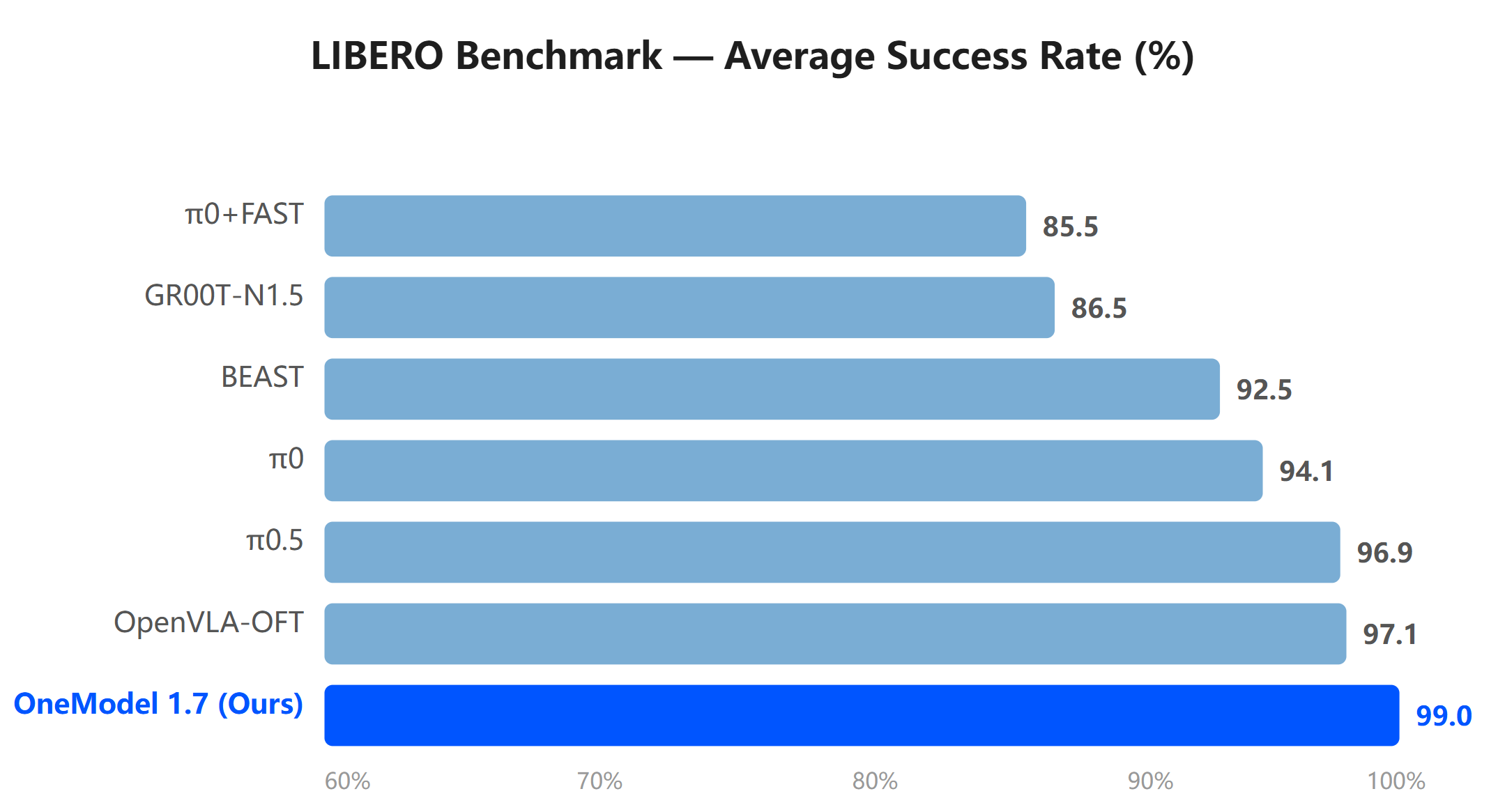
Figure 1: Average success rate comparison on the standard LIBERO benchmark
This performance is enabled by OneRobotics’ self-developed RL-Latent World Action Model architecture (RL-LWAM). The architecture consists of three core modules: the World Model for generalization across diverse environments, the Understand Expert for task comprehension and Skill scheduling, and the Action Expert for precise execution. The three modules are implicitly connected through Predictive Policy Latent, rather than relying on explicit intermediate images or coordinate transfers. On top of this architecture, a reinforcement learning closed loop and Success Memory mechanism continuously feed real deployment feedback back into the model, allowing capabilities to improve as deployment scales.
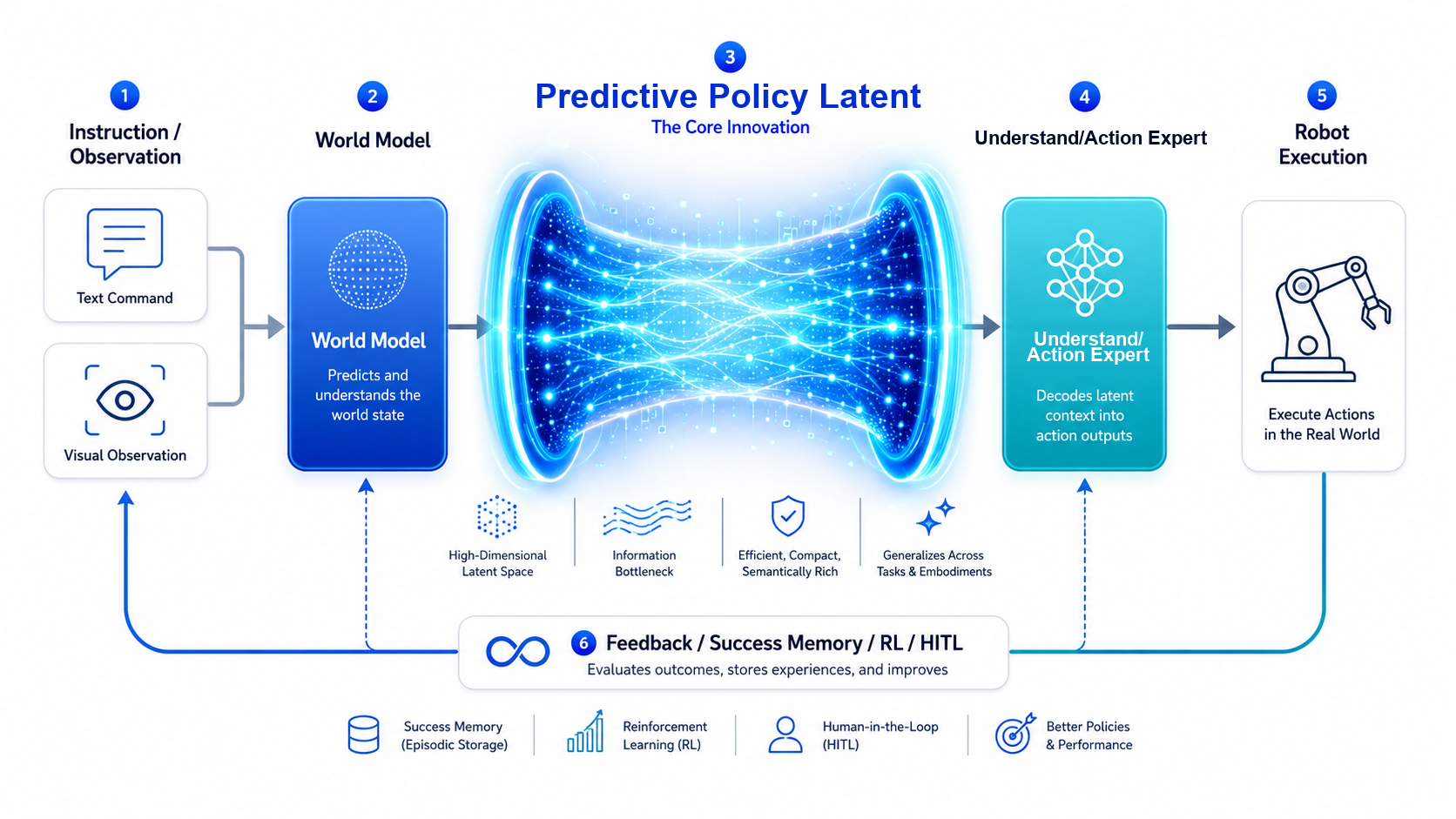
Figure 2: Complete architecture of OneModel 1.7 FrontoStria-RL; Predictive Policy Latent serves as the core transmission mechanism connecting the World Model, Understand Expert, and Action Expert
Why Do Home Robots Need a World Action Model?
Home environments are a core entry point for robots moving toward large-scale adoption, but they are also among the most demanding scenarios for intelligence. Unlike factory assembly lines or warehouse picking environments, no two home kitchens are exactly the same, no two tabletops are arranged identically, and the combination of daily tasks changes constantly. Robots must not only complete specific actions such as opening doors, folding clothes, carrying bowls, and organizing items with precision, but also understand tasks and act reasonably when facing unfamiliar objects, changing lighting conditions, and different home layouts.
Over the past two years, VLA models have become an important paradigm for action generation. Their strength lies in mapping visual observations and language instructions directly to robot actions in an end-to-end manner, making them efficient in scenarios where training data is sufficient and task boundaries are clear. However, relying solely on end-to-end action mapping also brings challenges: when object placement, camera viewpoints, lighting conditions, or the robot’s initial pose change, the action policy can be affected. For complex tasks with multiple stages and constraints, it is also easier to lose sight of the overall objective.
A World Model, by contrast, aims to build predictive capabilities around environmental states and task evolution, including object relationships, spatial structures, and the consequences of actions, giving it stronger generalization potential. The challenge lies in execution: if the action module is connected through explicit future images or intermediate coordinates, generation errors, information redundancy, and inference latency can be introduced. Without effective coupling with downstream policies, “understanding the world” does not naturally translate into “acting precisely.”
OneModel 1.7 does not simply stack a VLA model and a World Model together. Instead, it builds an implicit channel between high-level world understanding and low-level action policies through Predictive Policy Latent, allowing world understanding to directly support task planning and action execution.
Four Core Technical Innovations of OneModel 1.7 FrontoStria-RL
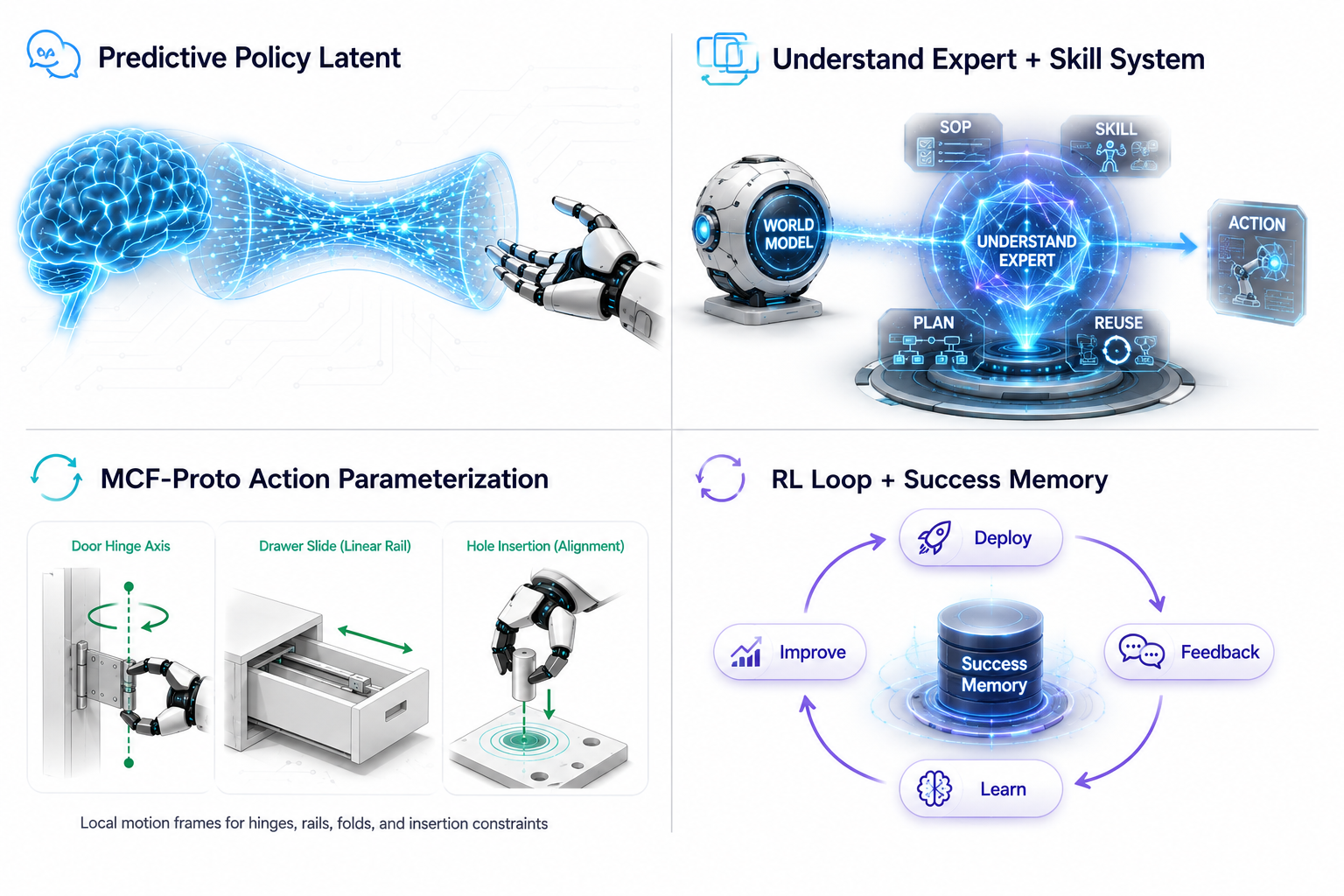
Figure 3: Four core technical innovations of OneModel 1.7 FrontoStria-RL
The high success rate of OneModel 1.7 is driven by four key technical breakthroughs:
Predictive Policy Latent: An action-policy-oriented implicit representation that transmits the World Model’s high-level understanding, replacing traditional reliance on explicit future images or target points and reducing information redundancy, generation errors, and execution discontinuity.
Understand Expert + Skill: Decomposes complex tasks into executable steps and schedules reusable Skills, giving long-horizon tasks clear stage-level planning and avoiding cases where local actions are correct but the global objective is lost.
MCF-Proto: Organizes action representations around local motion structures such as door hinges, sliding rails, holes, and folding lines, helping policies remain robust to viewpoint changes, initial-pose deviations, and scenario disturbances.
RL Closed Loop + Success Memory: Connects reinforcement learning and successful experience reuse with real deployment feedback, moving beyond the limitations of “train once, deploy once” offline models and continuously adapting to long-tail scenarios.
Real-Robot Test Results
In real-world tasks, OneModel 1.7 covers three representative categories: daily manipulation, high-precision manipulation, and high-dynamic interaction. Daily manipulation tasks such as laundry handling, clothes folding, dishwasher operation, and picking items from a conveyor belt achieved an average success rate of 99%. High-precision tasks such as test-tube handling, cup stacking, and pouring coffee beans achieved an average success rate of 97%. These results show that the model not only delivers leading performance on standard benchmarks, but also remains stable in tasks involving deformable objects, multi-stage workflows, fine alignment, and real contact feedback.
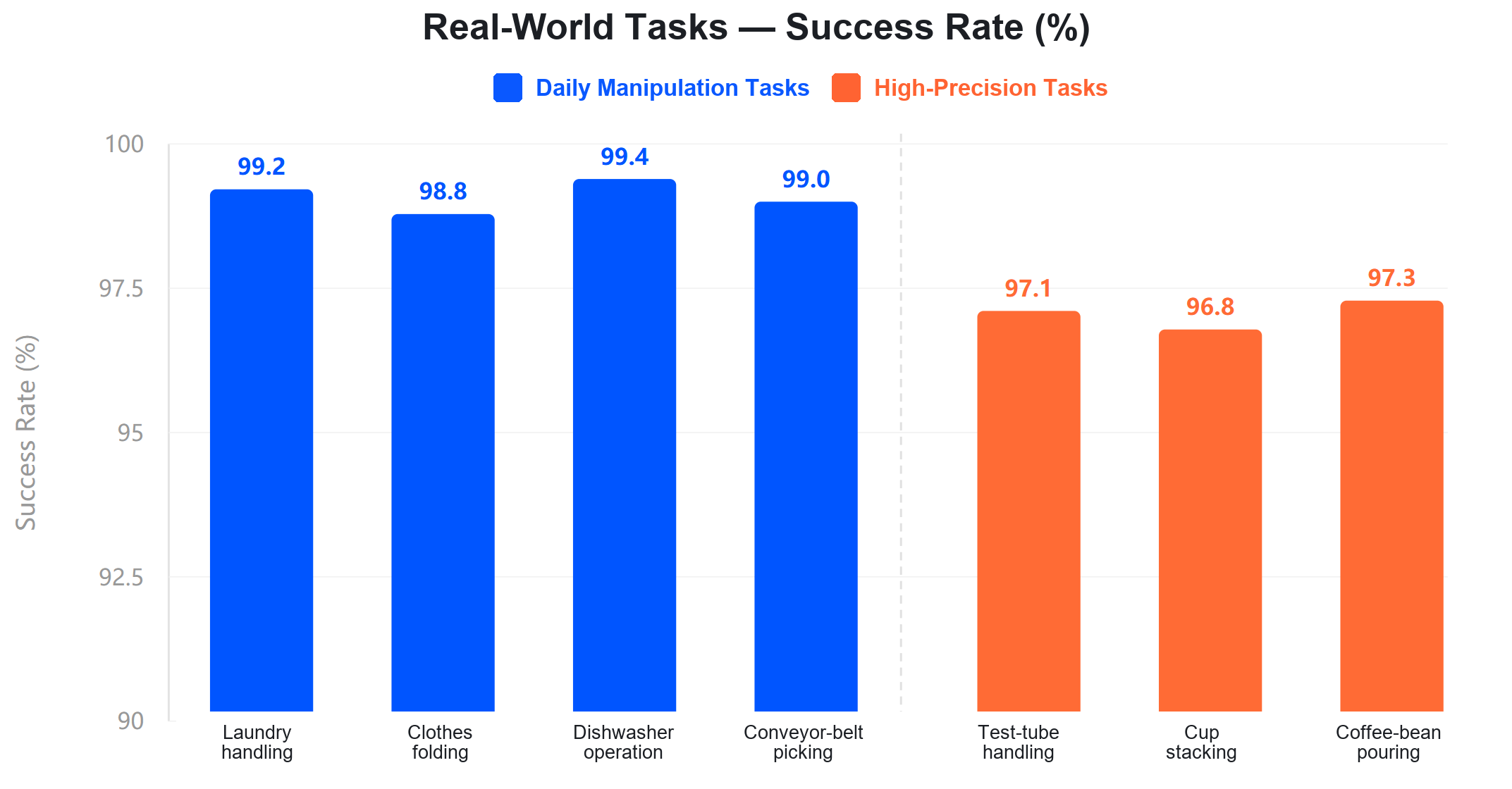
Figure 4: Real-robot validation for daily manipulation and high-precision tasks
Beyond contact-rich manipulation tasks, OneModel 1.7 was also validated in a human-robot table tennis rally scenario. Table tennis places extremely high demands on real-time perception, trajectory prediction, and rapid action generation, making it a strong test of the model’s responsiveness in high-dynamic interaction scenarios.
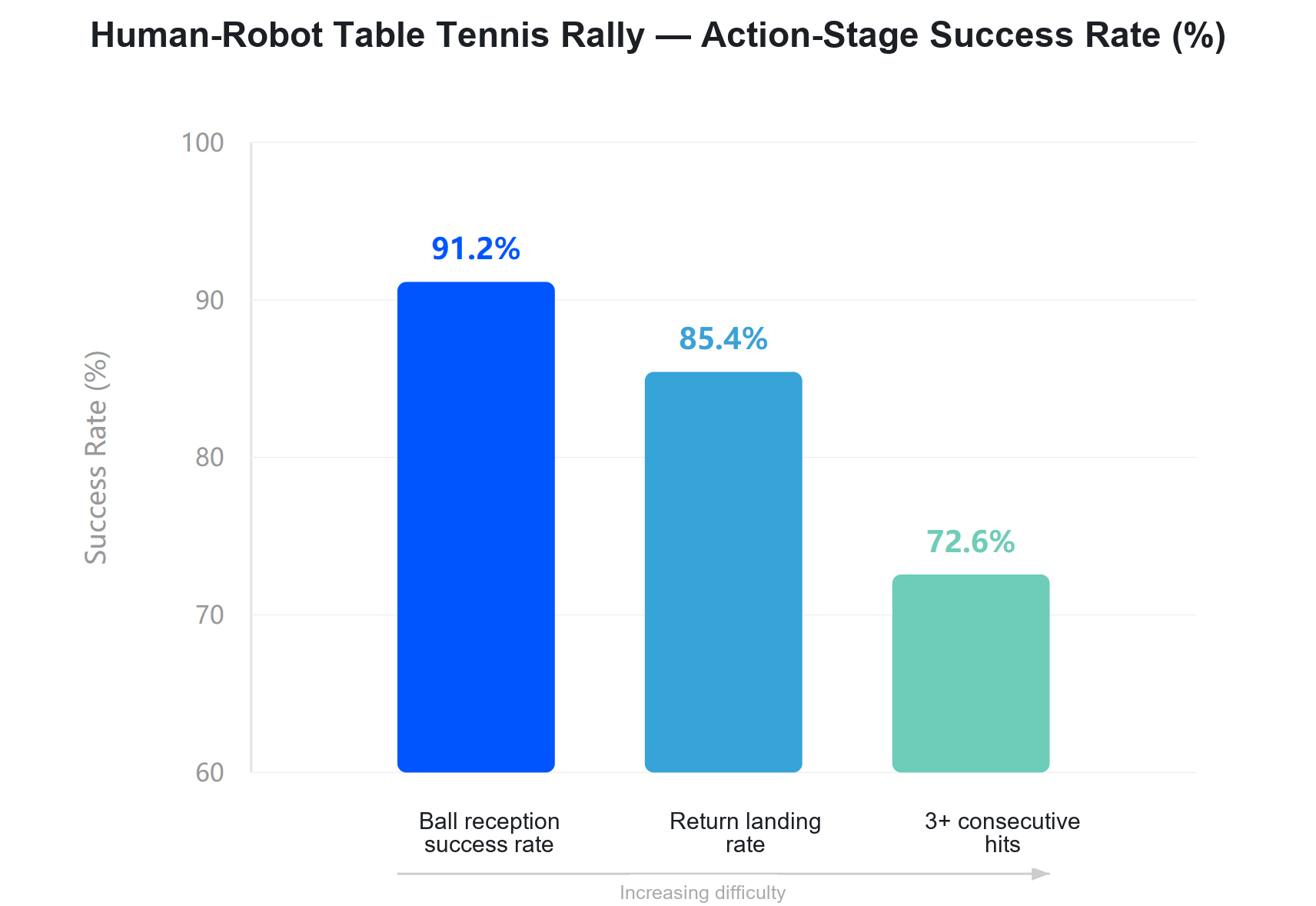
Figure 5: Dynamic scenario validation in human-robot table tennis rallies
The Next Step Toward Home Robots
As embodied AI moves into the real world, progress cannot rely solely on larger model parameters or more eye-catching one-off demonstrations. What will truly drive the large-scale deployment of home robots is a model system that combines generalized understanding, precise execution, and continuous evolution.
OneModel 1.7 FrontoStria-RL represents a key step along this path.
Looking ahead, OneRobotics will continue to advance model iteration around real home and service scenarios, helping robots move from “seeing and acting” toward becoming more adaptive, evolvable, and reliably useful over time.